
Fichier:PIA22063-MarsCuriosityRover-DrillingTests-20171017.jpg

{kind=link}
{kind=link}
{kind=link}
Fichier d’origine (1 024 × 512 pixels, taille du fichier : 82 kio, type MIME : image/jpeg)
Ce fichier et sa description proviennent de Wikimedia Commons.
{kind=link}
Description
| Description |
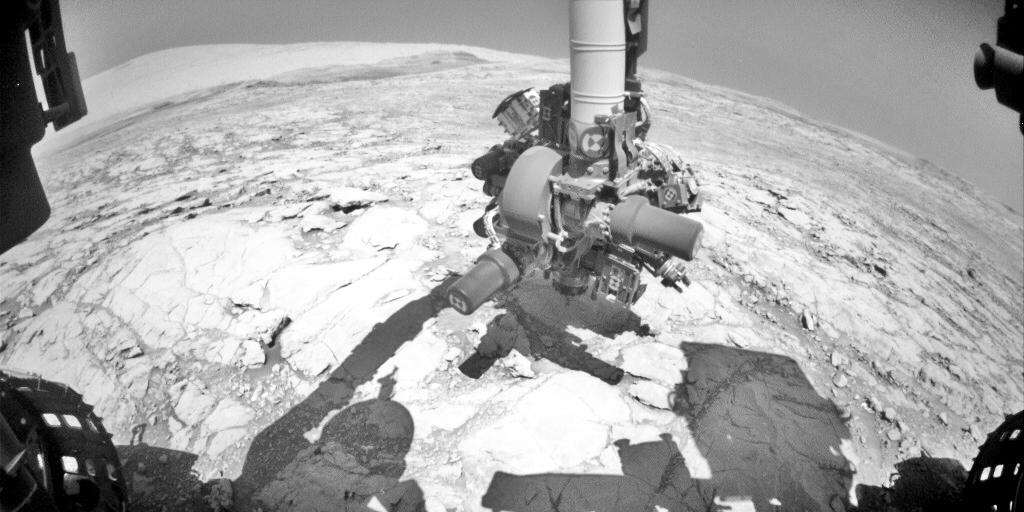
English: PIA22063: Mars Rover Step Toward Possible Resumption of Drilling
https://photojournal.jpl.nasa.gov/catalog/PIA22063 NASA's Curiosity Mars rover conducted a test on Oct. 17, 2017, as part of the rover team's development of a new way to use the rover's drill. This image from Curiosity's front Hazard Avoidance Camera (Hazcam) shows the drill's bit touching the ground during an assessment of measurements by a sensor on the rover's robotic arm. Curiosity used its drill to acquire sample material from Martian rocks 15 times from 2013 to 2016. In December 2016, the drill's feed mechanism stopped working reliably. During the test shown in this image, the rover touched the drill bit to the ground for the first time in 10 months. The image has been adjusted to brighten shaded areas so that the bit is more evident. The date was the 1,848th Martian day, or sol, of Curiosity's work on Mars In drill use prior to December 2016, two contact posts -- the stabilizers on either side of the bit -- were placed on the target rock while the bit was in a withdrawn position. Then the motorized feed mechanism within the drill extended the bit forward, and the bit's rotation and percussion actions penetrated the rock. A promising alternative now under development and testing -- called feed-extended drilling -- uses motion of the robotic arm to directly advance the extended bit into a rock. In this image, the bit is touching the ground but the stabilizers are not. Compare that to the positioning of the stabilizers on the ground in a 2013 image of the technique used before December 2016. In the Sol 1848 activity, Curiosity pressed the drill bit downward, and then applied smaller sideways forces while taking measurements with a force/torque sensor on the arm. The objective was to gain understanding about how readings from the sensor can be used during drilling to adjust for any sideways pressure that might risk the bit becoming stuck in a rock. While rover-team engineers are working on an alternative drilling method, the mission continues to examine sites on Mount Sharp, Mars, with other tools. NASA's Jet Propulsion Laboratory, a division of the California Institute of Technology, Pasadena, manages the Mars Science Laboratory Project for NASA's Science Mission Directorate, Washington. JPL designed and built the project's Curiosity rover and the rover's Hazcams. More information about Curiosity is online at http://www.nasa.gov/msl and http://mars.jpl.nasa.gov/msl/. |
| Date | Prise le 17 octobre 2017 |
| Source | https://photojournal.jpl.nasa.gov/jpeg/PIA22063.jpg |
| Auteur | NASA/JPL-Caltech |
{kind=link}
Conditions d’utilisation
| Ce fichier provient de la NASA. Sauf exception, les documents créés par la NASA ne sont pas soumis à copyright. Pour plus d'informations, voir la politique de copyright de la NASA. | ||
 |
Attention :
|
Historique du fichier
Cliquer sur une date et heure pour voir le fichier tel qu'il était à ce moment-là.
| Date et heure | Vignette | Dimensions | Utilisateur | Commentaire | |
|---|---|---|---|---|---|
| actuel | 25 octobre 2017 à 17:59 | | 1 024 × 512 (82 kio) | Drbogdan | User created page with UploadWizard |
Utilisation du fichier
La page suivante utilise ce fichier :
Usage global du fichier
Les autres wikis suivants utilisent ce fichier :
- Utilisation sur en.wikipedia.org
- Utilisation sur zh.wikipedia.org
{kind=link}